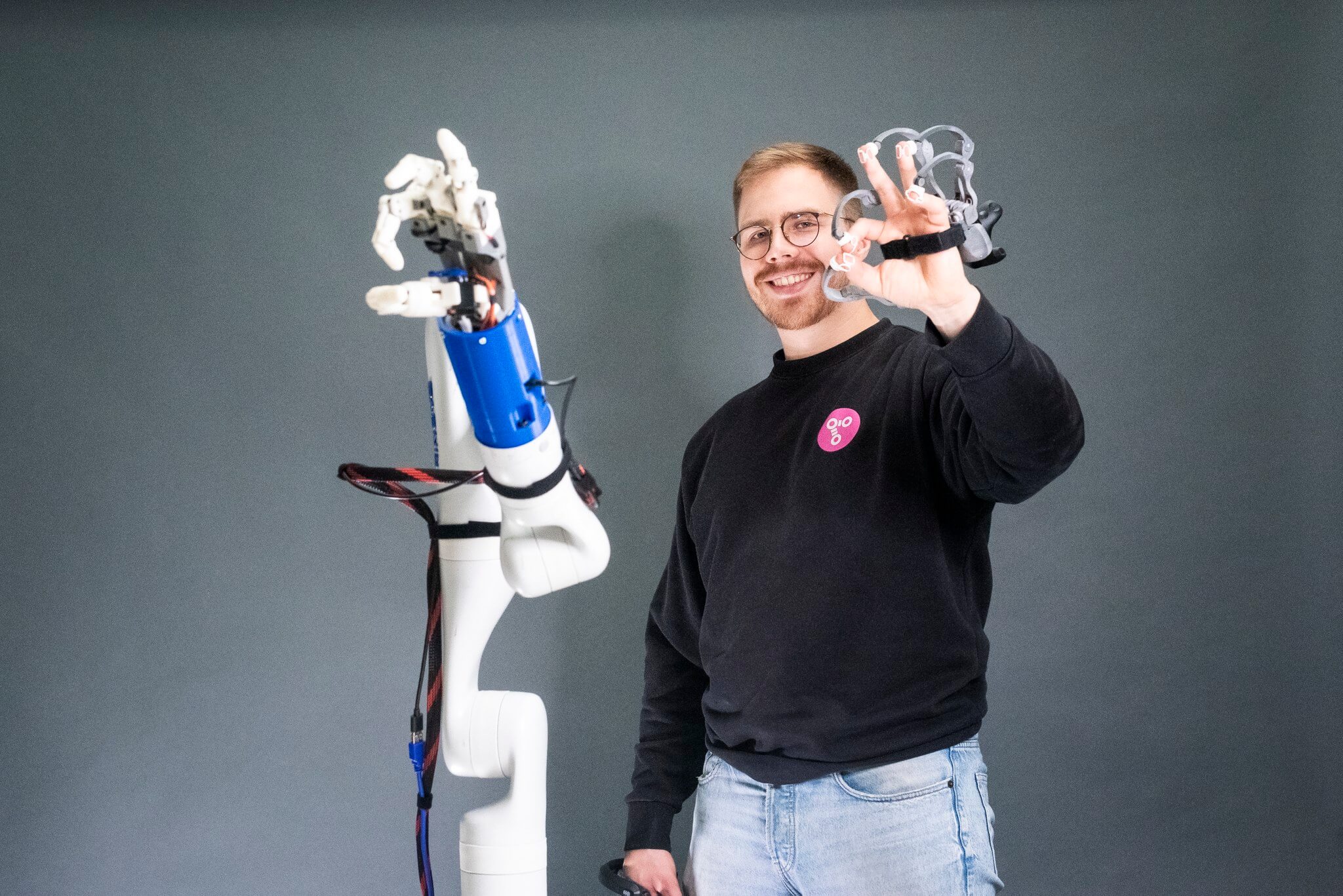
Together with our international partners, we developed a solution that enables human-machine interaction in an interesting way. By putting a haptic controller glove on their hand, an operator can control the movements of the robot and its gripper by simply moving their hand. This RIM project was part of the EU-funded MIND4MACHINES project, which supports the development of smart and resource-efficient production technologies.
Human-machine interaction
Traditionally, robotic movements are programmed manually or physically (some collaborative robots) by point-to-point. In this project, we developed a solution that directly translates the movements of the human hand into movements of the robot and the multi-fingered hand. This can reduce the time needed to program the robot. Also it allows for easy implementation of more complex movements. In particular, it can facilitate the robotisation of tasks that require precision and dexterity.
The essence of the technology
In this project we used Kinova’s robot, a multi-finger gripper developed by the project’s technical partner Siemens and a haptic control glove from our project partner MAGOS. This glove uses sensors to sense hand and finger movements and collects data from them. In order for the robot and the multi-finger gripper to use this data and move accordingly, the data needs to be converted into a format that they can understand. In this project, our task was to do just that – integrate different devices to work together through an interface.
We optimised the interface between the components so that they work seamlessly together. The motion data collected by the haptic glove is converted through the interface into the control commands needed by the robot and its gripper. This allowed the user of the glove to reproduce the movements of their hand and fingers as real-time, accurate and repeatable movements of the robot and the attached multi-finger gripper.
It was also very important to take into account the safety of the operator and that only the desired movements are repeated. This was solved with a ‘dead man’s switch’ held in other hand by the operator. By pressing the switch, the system works and by releasing it stops the robot and the gripper from moving.
We also enabled remote control of the robot using augmented reality* (XR). This opens up new possibilities for automating dangerous work environments.
Application possibilities
The technology developed in the RIM project can be widely applied in industry in the future, such as:
- Assembly tasks requiring dexterity
- Remotely controlled operations in hazardous environments
- Complex quality control tasks and measurements
- Programming robots without programming skills
Read more about the project on our blog by clicking-here or check out our other EU projects by clicking-here.
*XR or Extended Reality is an umbrella term for Augmented Reality (AR), Virtual Reality (VR) and various intermediate forms of both (MR).


