Robot cell for automatic drive and processing objects
Grippers play a key role in automation. For a robot to perform its intended task reliably, it needs the right gripper. In some applications, an off-the-shelf solution is available, but often a gripper must be specifically designed for the application. We design and implement gripper solutions based on the requirements of each use case.
We have developed mechanical, vacuum, and magnetic grippers for a wide range of applications. In addition, we have developed a conveyor gripper for handling products that are challenging for traditional gripper types.
When needed, we also integrate or design other end-of-arm tooling for the robot, such as screwdrivers, dispensing nozzles, and grinding heads.
Key input parameters include the product’s size, weight, shape, surface, and how the material behaves during handling. In addition, production speed, required accuracy, operating environment, and the robot’s payload and motion paths must be considered. Some products require very gentle handling to maintain their shape, while others are difficult to grip securely. In some applications, picking must work reliably in dusty conditions, while in others tight tolerances set constraints on the gripper’s size. By taking these factors into account from the outset, a gripper can be designed to operate reliably and support the overall efficiency of the process.

We grip any challenge

Mechanical gripper
This cheerful character was designed for a robotic cell where there was a need to handle multiple different products with a single gripper. The gripping itself takes place from a circular opening in the center of the products. For this reason, three small fingers (the lower protrusions visible in the image) were designed to ensure a secure grip.
Mechanical gripper
In the design of this gripper, material selection played a key role. The surfaces in contact with the component needed to be durable, while also soft enough to avoid damaging the handled part. As the component was also very heavy, the gripper was required to provide an especially firm and secure grip. The suitability of different material options was evaluated using simulation software, and ultimately an appropriate plastic was selected for the gripping surfaces, along with a composite material for the pins supporting the grip.
– For safety reasons, the gripper is equipped with a pneumatic brake that prevents the component from falling even in the event of a disturbance, explains the gripper’s designer, Eetu Koskela.
The gripper was also designed to be easily detachable using pneumatic control. It attaches to the gripper stand via the rods visible on the left side of the image when the robot is using another tool.
Mechanical gripper
This gripper is part of a measurement and sorting cell we implemented for our customer. The design focused on a gentle gripping approach to ensure that the handled components are not damaged during processing. The structure of the measurement station also required an extended reach, which is why the gripper was designed with a longer arm. This can be seen in the upper part of the image.
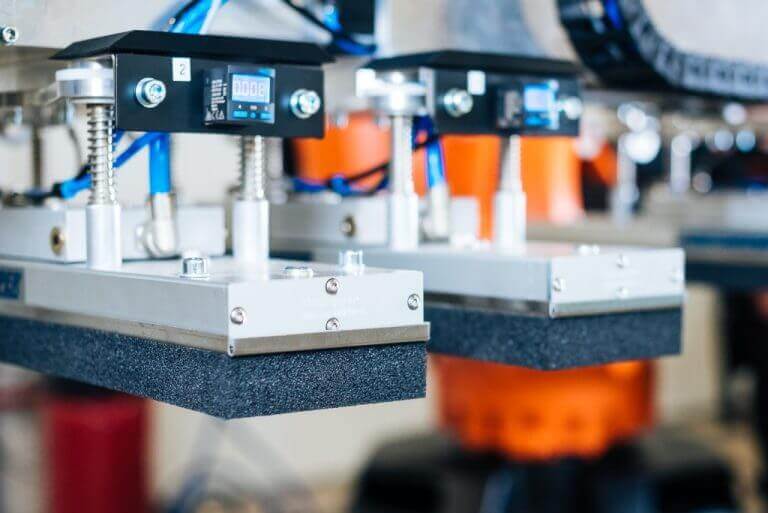
Vacuum gripper
This compact vacuum gripper was designed for a robotic cell where RFID tags are transferred between multiple positions. Vacuum gripping was selected due to the small size and flat surface of the tags. Fast pick-up and smooth release were also key considerations in the design.
– The Schmalz spring plunger integrated into the gripper allows for height variation at the pick-up point and ensures gentle handling, explains our Mechanical Designer Janne Paaso.
Vacuum gripper
This gripper is designed for palletizing furniture packages of different sizes. As the packages are wrapped in plastic, a sufficiently large gripping area was required to ensure a reliable hold throughout the transfer. Based on testing, the solution utilizes four UniGripper vacuum grippers, around which the rest of the gripper functions were designed. Due to the varying package sizes, the outer foam grippers were made adjustable.
– The gripping width can be adjusted automatically according to the product by changing the position of the grippers. Depending on the need, two, three, or four foam grippers can be used. In addition, the gripper is equipped with a distance-measuring laser sensor, allowing the robot to detect the actual height of the pallet or stack and place each item at the correct level, explains Mechanical Designer Eetu Koskela.
⬇

Flexibility in use was a key consideration in the design. The customer must be able to add new products to the system independently, so the solution needed to operate reliably with different types of packages without complex adjustments. In addition to the distance sensor, the gripper utilizes vacuum sensors to ensure that the foam grippers maintain a secure hold and that the package has been properly picked. The gripping elements are also mounted with flexibility to prevent damage to the packages during handling.
Magnetic gripper
The metallic material of the components enabled the use of a magnetic gripper. This solution allows efficient handling of large machined parts weighing tens of kilograms. A slight compliance implemented in the mounting of the gripping head improves handling reliability.
Magnetic gripper
This gripper was designed for our customer’s palletizing robot handling very long components. The design needed to ensure that neither the gripper nor the handled parts would bend during transfers. A rigid 3-meter aluminum profile was selected as the gripper frame, along with a flange welded from black steel. Gripping is achieved using five pneumatically operated Schmalz magnetic grippers. Two of the grippers are equipped with sensors to monitor the reliability of the grip.
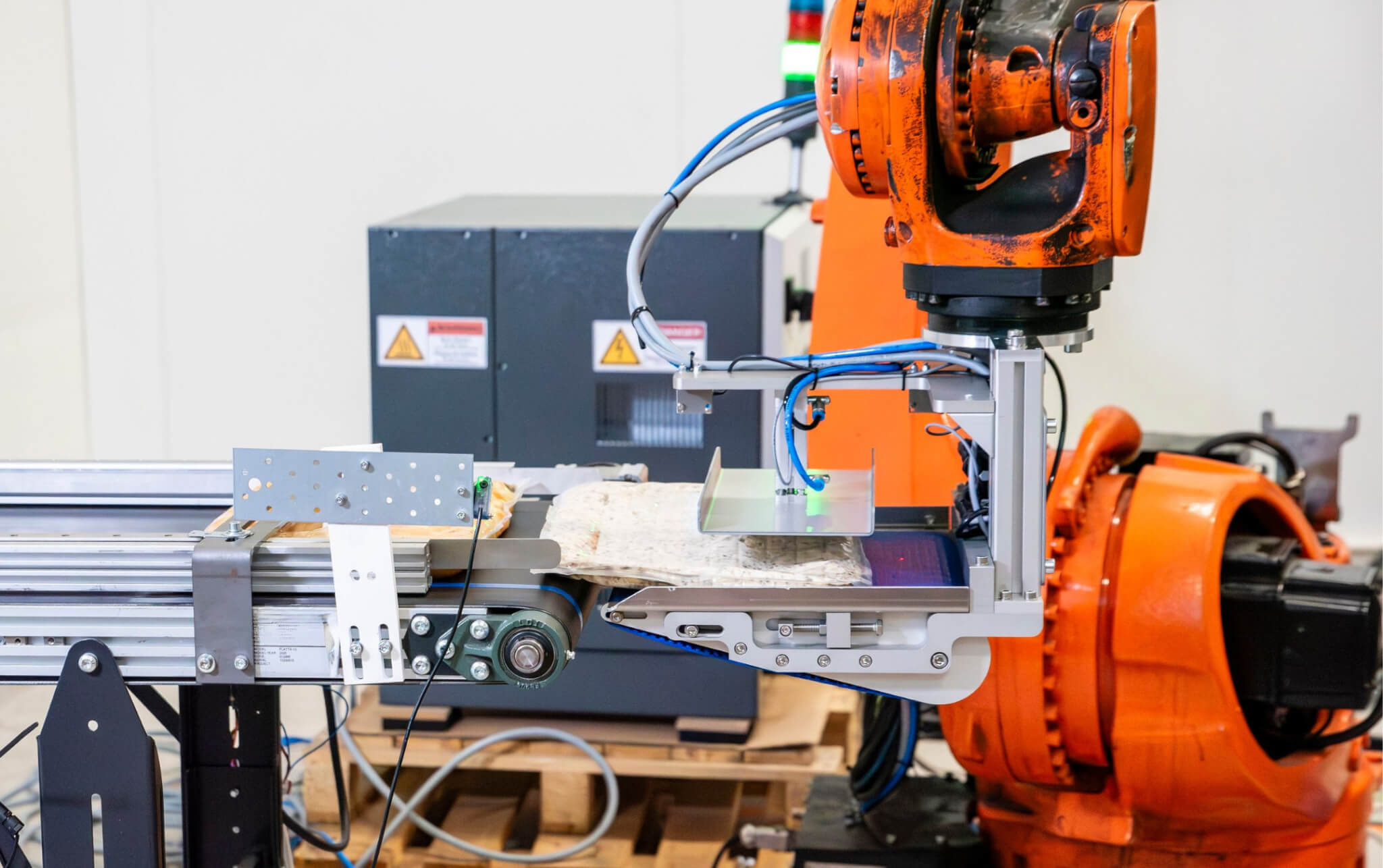
Custom gripper
This gripper was developed for handling vacuum-packed liquid food pouches. The flexible and shape-changing structure of the products does not allow for reliable vacuum cup gripping. The gripper uses a small conveyor to guide the product onto the gripper in a controlled manner, after which it is secured in place for transfer. This solution enabled the removal of manual handling and improved the reliability of the process.
– The biggest challenge was extremely tight tolerances, meaning the product had to be positioned precisely in the correct location, explains Mechanical Designer Janne Paaso.
The packing had to be done very tightly inside the crate, with only about one centimeter of empty space between the pouches. As a result, every millimeter of the gripper had to be carefully designed, and all unnecessary elements had to be kept away from its sides.
⬇
When a product is difficult to grip reliably, the task often remains manual or causes disruptions in production. If your production involves handling hard-to-grip products that are still placed manually or that repeatedly fall from vacuum grippers, get in touch. Together, we can assess whether this gripper is a suitable solution or design a customized alternative for your needs.
⬇

Robot cell for automatic drive and processing objects
Robot cell for automatic drive and operation of machine tools

Robotic cell for palletising furniture board packages

Robotic cell for loading the machining centre
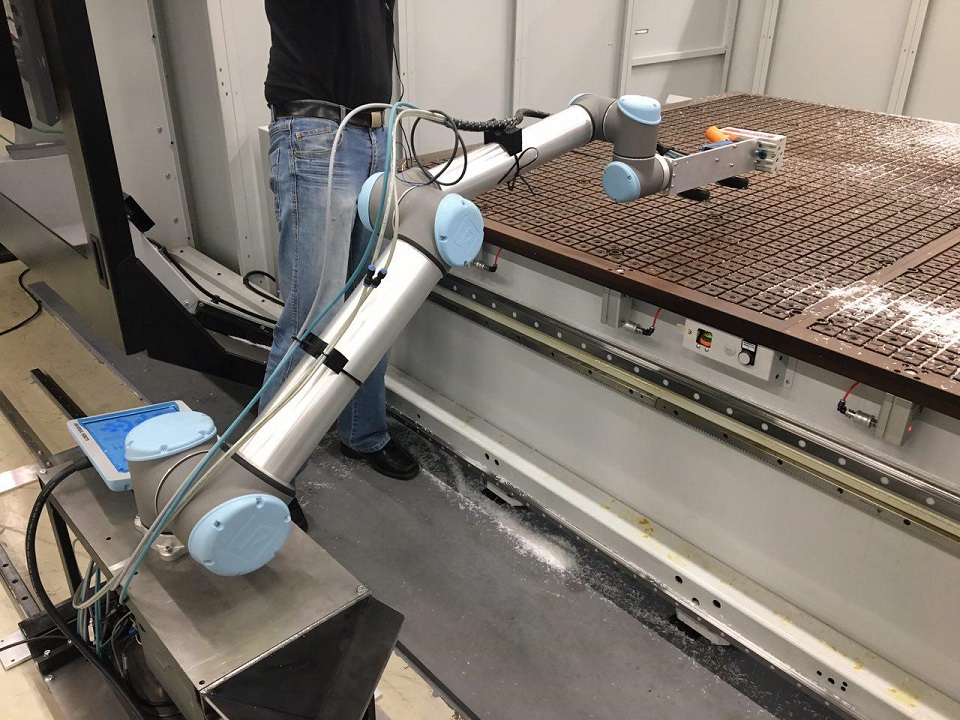
Robotic cell with machine vision for a wide variety of tasks

Robotic Cell for RFID Tag Handling

