Robottisolu automaattiajoon ja kappaleen käsittelyyn
Tarttujilla on keskeinen rooli automaatiossa. Jotta robotti pystyy tekemään sille suunnitellun työn luotettavasti, se tarvitsee oikean tarttujan. Joissain sovelluksissa valmis ratkaisu löytyy markkinoilta, mutta usein tarvitaan juuri kohteeseen suunniteltu tarttuja. Suunnittelemme ja toteutamme tarttujaratkaisut aina käyttökohteen vaatimusten mukaan.
Olemme toteuttaneet mekaanisia, alipaineella toimivia ja magneettisia tarttujia monenlaisiin tarpeisiin. Lisäksi olemme kehittäneet liukuhihnatarttujan, jolla voidaan käsitellä tuotteita, jotka ovat perinteisille tarttujatyypeille haastavia.
Tarvittaessa integroimme tai suunnittelemme robotille myös muut tarvittavat työkalut, kuten ruuvinvääntimet, ruiskusuuttimet ja hiomapäät.
Oleellisia lähtötietoja ovat tuotteen koko, paino, muoto, pinta sekä materiaalin käyttäytyminen käsittelyn aikana. Lisäksi on huomioitava tuotannon nopeus, vaadittu tarkkuus, käyttöympäristö sekä robotin kantokyky ja liikeradat. Osa tuotteista vaatii hyvin hellävaraista käsittelyä, jotta niiden muoto säilyy, kun taas toisista on haastavaa saada pitävää otetta. Joissain kohteissa poiminnan on toimittava pölyisissä olosuhteissa, toisissa taas tiukat toleranssit asettavat vaatimuksia tarttujan koolle. Kun nämä asiat huomioidaan alusta asti, voidaan suunnitella tarttuja, joka toimii luotettavasti ja tukee koko prosessin sujuvuutta.

Tartumme mihin vain

Mekaaninen tarttuja
Tämä hymyilevä kaveri suunniteltiin robottisoluun jossa oli tarve siirrellä useampaa erilaista tuotetta samalla tarttujalla. Itse tartunta tapahtuu tuotteiden keskellä olevasta pyöreästä aukosta. Tämän vuoksi tarttujaan suunniteltiin kolme pientä kynttä (kuvassa näkyvät alimmaiset ulokkeet) varmistamaan tukeva ote.
Mekaaninen tarttuja
Tämän tarttujan suunnittelussa korostui oikeiden materiaalien valinta. Kappaleen kanssa kosketuksissa olevien pintojen tuli kestää käyttöä, mutta samalla olla niin pehmeitä, etteivät ne vaurioita siirrettävää kappaletta. Koska kappale oli myös hyvin painava, tarttujalta vaadittiin erityisen pitävä ja turvallinen ote. Eri materiaalivaihtoehtojen soveltuvuutta arvioitiin simulointiohjelmistolla, ja lopulta tartuntapinnoille valittiin sopiva muovi sekä otetta tukeville tapeille tarkoitukseen soveltuva komposiittimateriaali.
– Turvallisuussyistä tarttujassa on paineilmasylinterillä toimiva jarru, joka estää kappaleen putoamisen myös häiriötilanteessa, kertoo tarttujan suunnittelija Eetu Koskela.
Tarttuja toteutettiin myös helposti irrotettavaksi paineilmaohjauksen avulla. Kuvan vasemmalla puolella näkyvistä tangoista se kiinnittyy tarttujatelineeseen silloin, kun robotilla on käytössä toinen työkalu.
Mekaaninen tarttuja
Tämä tarttuja on osa asiakkaallemme toteuttamaamme mittaus- ja lajittelusolua. Suunnittelussa painotettiin hellävaraista tartuntaotetta, jotta siirrettävät kappaleet eivät vaurioidu käsittelyn aikana. Mittausaseman rakenne edellytti tarttujalta myös tavallista suurempaa ulottuvuutta, minkä vuoksi siihen toteutettiin pidempi varsi. Tämä näkyy kuvan yläosassa.
Imutarttuja
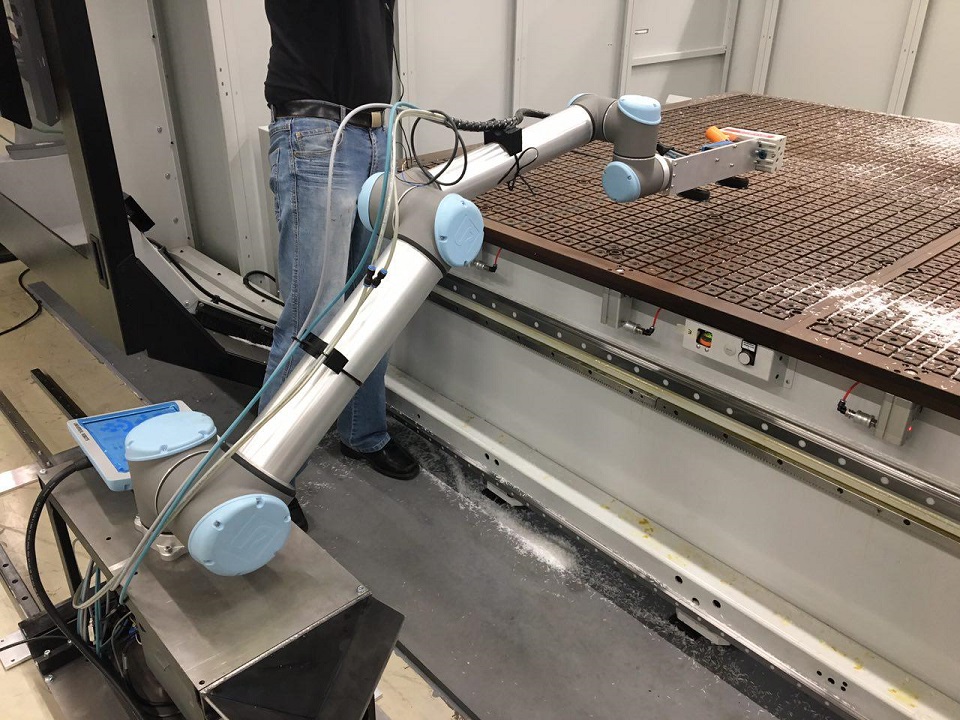
Tämä pieni imukuppitarttuja suunniteltiin robottisoluun, jossa RFID-tunnisteita siirretään useaan eri pisteeseen. Imukuppitartunta valittiin tunnisteiden pienen koon ja tasaisen pinnan perusteella. Ratkaisussa korostuivat myös nopea tartunta ja sujuva irrotus.
– Tarttujassa oleva Scmalz:in jousijalka mahdollistaa noukintapisteen korkeusvaihtelun huomioimisen ja tekee tartunnasta hellän, kertoo mekaniikkasuunnittelijamme Janne Paaso.
Imutarttuja
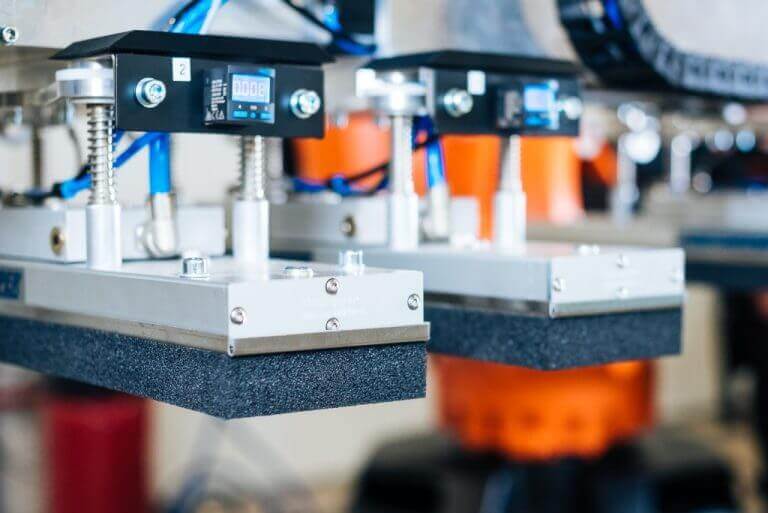
Tämä tarttuja on suunniteltu erikokoisten kalustepakkausten lavaamiseen. Koska pakkaukset on kääritty muoviin, tarttujalta vaadittiin riittävän laaja tartunta-alue, jotta ote pysyy luotettavasti koko siirron ajan. Testien perusteella ratkaisuksi valittiin neljä UniGripperin alipainetarttujaa, joiden ympärille suunniteltiin tarttujan muut toiminnot. Vaihtelevan kokoisten pakkausten vuoksi uloimmat vaahtomuovitarraimet toteutettiin liikuteltavina.
– Tarttujan oteleveyttä voidaan säätää automaattisesti kappaleen mukaan muuttamalla tarraajien sijaintia. Tarpeen mukaan käytössä voi olla kaksi, kolme tai neljä vaahtomuovitarraajaa. Lisäksi tarttujassa on etäisyyttä mittaava laseranturi, jonka avulla robotti tunnistaa lavan tai pinon todellisen korkeuden ja osaa asettaa kappaleen aina oikealle tasolle, kertoo mekaniikkasuunnittelija Eetu Koskela.
⬇

Suunnittelussa huomioitiin käytön joustavuus. Asiakkaan on voitava lisätä uusia tuotteita ohjelmaan myös itse, joten ratkaisun piti toimia luotettavasti erilaisilla pakkauksilla ilman monimutkaista säätöä. Etäisyysanturin lisäksi tarttujassa hyödynnetään alipaineantureita, joiden avulla varmistetaan, että vaahtomuovitarraimien ote pitää ja pakkaus on varmasti tarttunut mukaan. Tarrainosat on lisäksi kiinnitetty joustavasti, jotta pakkaukset eivät vahingoitu herkästi käsittelyn aikana.
Magneettitarttuja
Kappaleiden metallinen materiaali mahdollisti magneettitarttujan käytön. Ratkaisulla voidaan käsitellä tehokkaasti suuria, kymmenien kilojen painoisia koneistettuja kappaleita. Tartuntapään kiinnitykseen toteutettu pieni jousto parantaa käsittelyn varmuutta.
Magneettitarttuja
Tämä tarttuja suunniteltiin asiakkaallemme erittäin pitkien kappaleiden lavausrobotille. Suunnittelussa piti varmistaa, etteivät tarttuja tai siirrettävät kappaleet pääse taipumaan siirtojen aikana. Tarttujan rungoksi valittiin jäykkä 3-metrinen alumiiniprofiili ja mustasta raudasta hitsattu laippa. Tartunta toteutettiin viidellä Schmalzin paineilmatoimisella magneettitarraimella. Kahdessa tarraimessa on anturit, joiden avulla tartunnan pitävyyttä voidaan valvoa.
Erikoistarttuja
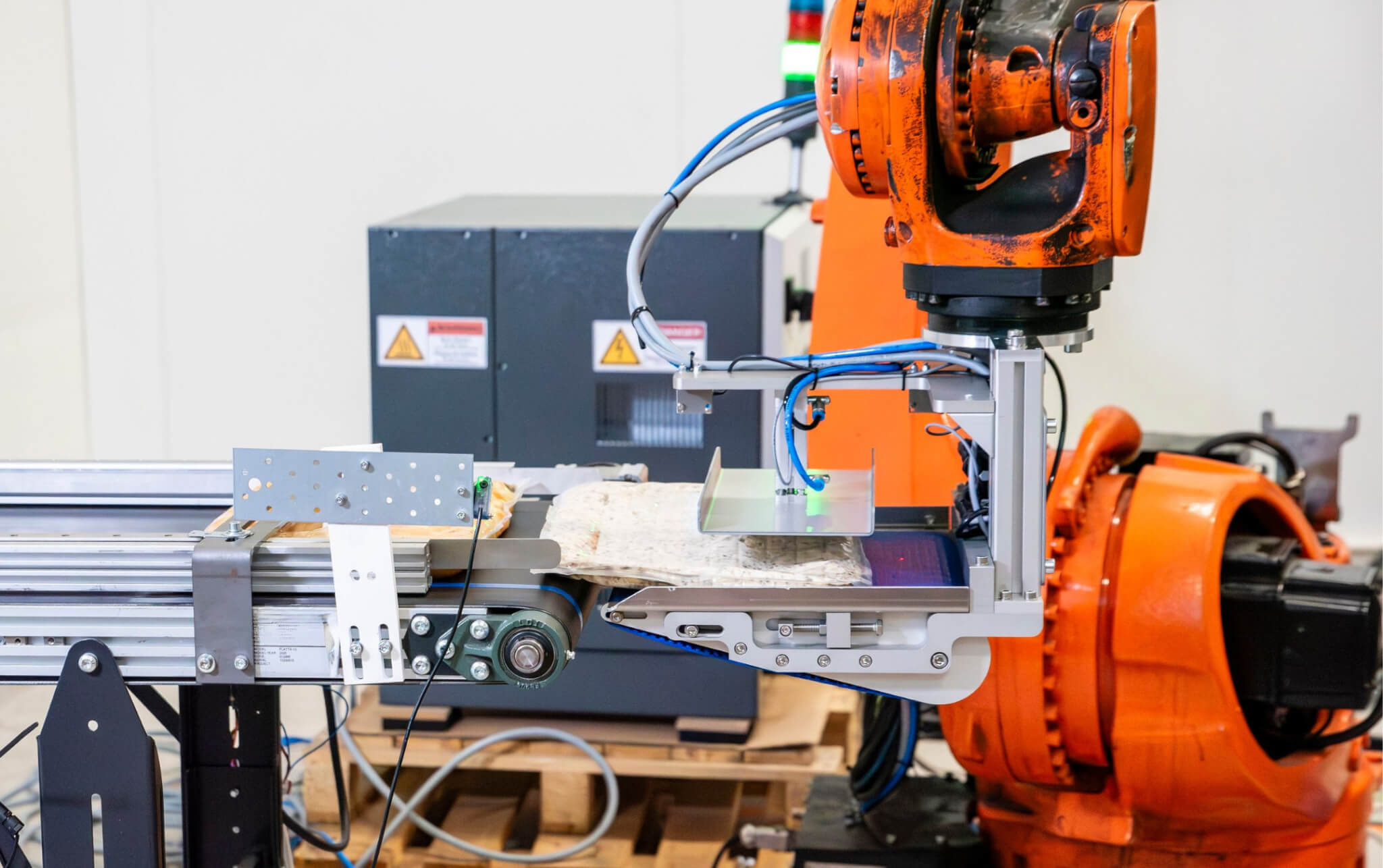
Tämä tarttuja kehitettiin vakuumipakattujen nestemäisten elintarvikepussien siirtelyyn. Tuotteiden joustava ja muotoaan muuttava rakenne ei mahdollista luotettavaa imukuppitartuntaa. Tarttujassa pieni kuljetin vetää tuotteen hallitusti tarttujan päälle, minkä jälkeen tuote lukitaan paikalleen siirtoa varten. Ratkaisun ansiosta manuaalinen käsittely voitiin poistaa ja työvaiheen toimintavarmuus parani.
– Isoin haaste olivat todella tiukat toleranssit, eli tuotteen piti osua tarkasti oikeaan kohtaan, kertoo mekaniikkasuunnittelija Janne Paaso.
Ladonta piti tehdä korin sisään erittäin tiiviisti, sillä pussien väliin jäi vain noin sentti tyhjää tilaa. Siksi tarttujan jokainen millimetri oli suunniteltava tarkasti, ja kaikki ylimääräinen piti siirtää pois sen kyljiltä.
⬇
Kun tuotteeseen on hankala tarttua luotettavasti, työvaihe jää usein käsin tehtäväksi tai aiheuttaa häiriöitä tuotannossa. Jos tuotannossanne käsitellään vaikeasti tartuttavia tuotteita joiden ladonta tehdään edelleen käsin tai jotka putoavat toistuvasti imukuppitarttujan kyydistä, ota yhteyttä. Selvitämme yhdessä, voisiko tämä tarttuja olla sopiva ratkaisu, tai suunnittelemme tarpeeseenne räätälöidyn vaihtoehdon.
⬇

Robottisolu automaattiajoon ja kappaleen käsittelyyn
Robottisolu automaattiajoon ja työstökoneiden käyttöön

Robottisolu kalustelevypakettien palletointiin

Robottisolu koneistuskeskuksen panostukseen
Robottisolu konenäöllä monenlaisiin tehtäviin

Robottisolu RFID-tunnisteiden käsittelyyn

