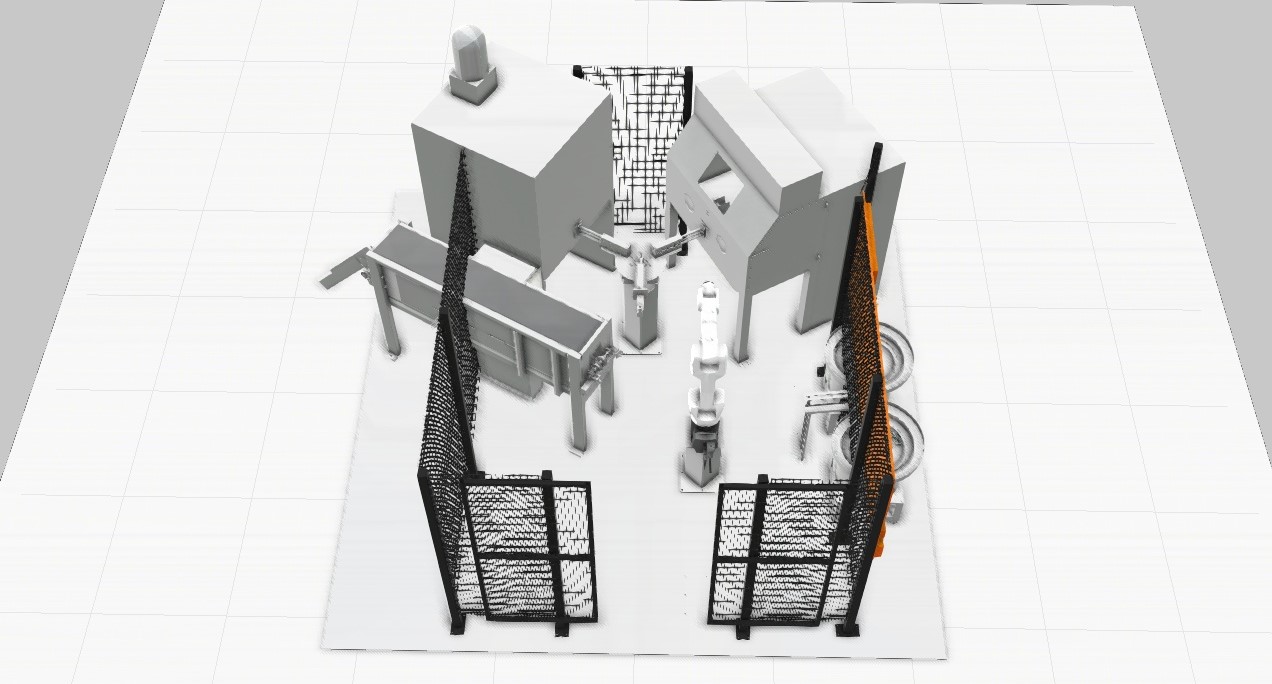
Toimittamassamme esikäsittelysolu-kokonaisuudessa robotti (KUKA KR10) käyttää raepuhalluskammiota ja pinnoitusyksikköä pyörityspöydän avulla. Robotti poimii kappaleet tärymaljoilta ja asettaa ne pyörityspöydän jigeihin. Pöydän sylinterit työntävät kappaleet vuorollaan käsittelyyn. Muokkasimme kaapit ja täryt automaattiajoon ja viiden erilaisen kappaleen käsittelyyn.
Toimitus sisälsi kaiken suunnittelusta hankintoihin, kammioiden ja täryjen muokkaukseen, työsyklin ja käyttöliittymän tekoon, testaukseen, asennukseen ja käyttöönottoon asti. Ohjaus toteutettiin Beckhoffin logiikalla.