Kehitimme yhdessä kansainvälisten yhteistyökumppaniemme kanssa ratkaisun, joka mahdollistaa ihmisen ja koneen vuorovaikutuksen mielenkiintoisella tavalla. Pukemalla käteensä haptisen ohjainhansikkaan ihminen voi ohjata robotin ja sen tarttujan liikkeitä pelkästään kättään liikuttamalla. Tämä EU-rahoitteinen RIM-projekti oli osa MIND4MACHINES-hanketta, joka tukee älykkäiden ja resurssitehokkaiden tuotantoteknologioiden kehittämistä.
Ihmisen ja koneen vuorovaikutus
Perinteisesti robottien liikkeet ohjelmoidaan manuaalisesti tai ohjaamalla yhteistyörobottia fyysisesti pisteestä pisteeseen. Tässä projektissa kehittämämme ratkaisu muuntaa ihmiskäden liikkeet suoraan robotin ja monisormitarttujan liikkeiksi. Tämä voi vähentää robotin ohjelmointiin kuluvaa aikaa ja mahdollistaa monimutkaisten liikkeiden helpon toteuttamisen. Erityisesti se voi helpottaa tarkkuutta ja näppäryyttä vaativien työvaiheiden robotisointia.
Teknologian ydin
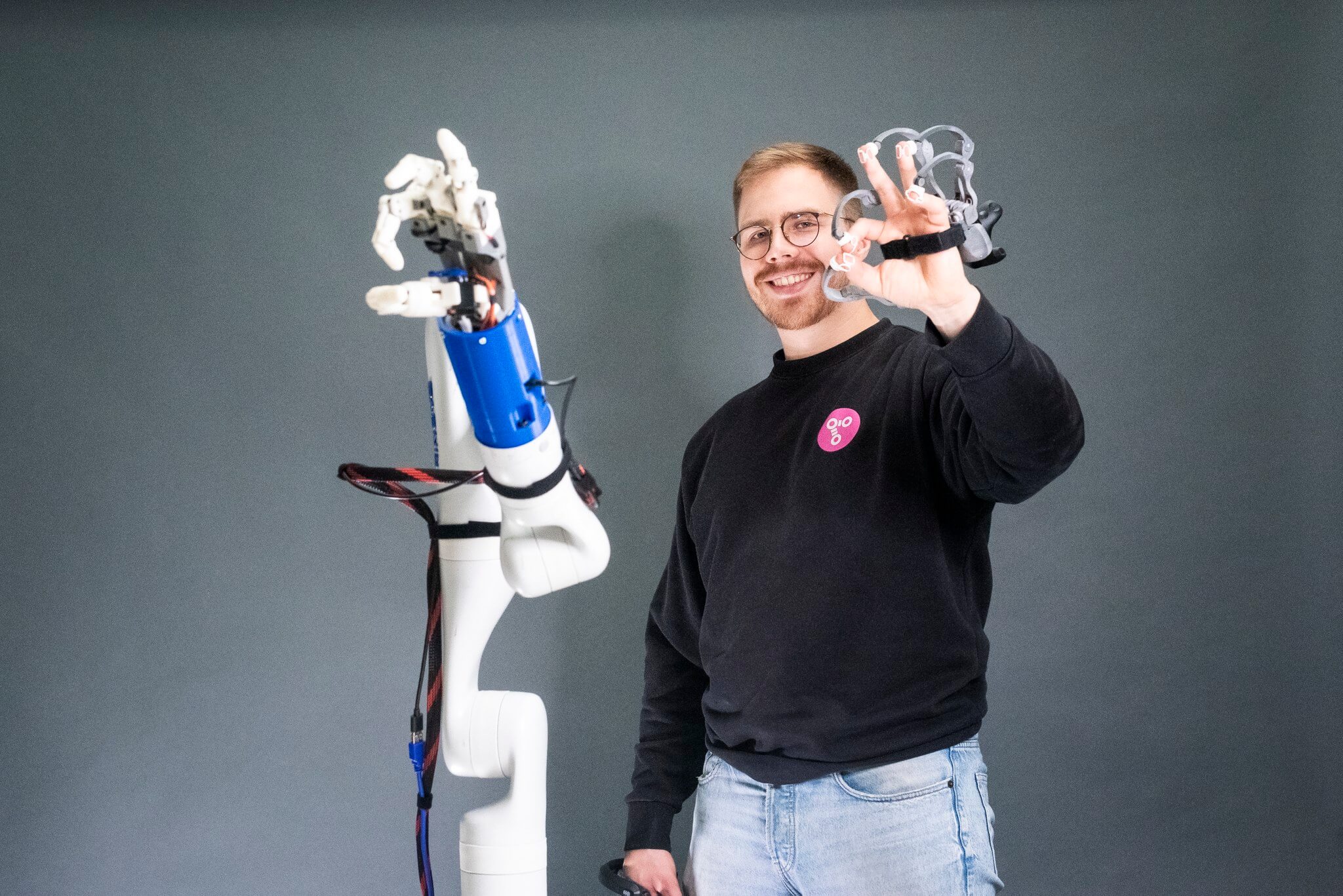
Hyödynsimme RIM-projektissa Kinovan käsivarsirobottia, projektin teknisen yhteistyökumppanin Siemensin kehittämää monisormista tarttujaa sekä projektipartnerimme MAGOSin haptista ohjainhansikasta. Tämä hansikas aistii sensoreiden avulla käden ja sormien liikkeitä ja kerää niistä dataa. Jotta käsivarsirobotti ja monisormitarttuja voisivat hyödyntää tätä dataa ja liikkua sen mukaisesti, täytyy data muuntaa niiden ymmärtämään muotoon. Projektissa tehtävänämme oli juuri tämä: eri laitteiden integrointi toimimaan yhdessä rajapinnan kautta.
Optimoimme komponenttien välisen rajapinnan niin, että ne toimivat saumattomasti yhteen. Haptisen hanskan keräämä liikedata muuntuu rajapinnan kautta robotin ja sen tarttujan tarvitsemiksi ohjauskomennoiksi. Näin ohjaushansikkaan käyttäjä saa kätensä ja sormiensa liikkeet toistettua robotin ja siinä kiinni olevan monisormitarttujan reaaliaikaisina, tarkkoina ja toistettavina liikkeinä.
Projektissa oli hyvin tärkeää myös huomioida käyttäjän turvallisuus ja se, että vain toivotut liikkeet toistetaan. Tämä ratkaistiin toisessa kädessä pidettävällä niin sanotulla kuolleen miehen kytkimellä. Järjestelmä toimii kytkintä painamalla. Kytkimen vapauttaminen taas pysäyttää robotin ja tarttujan liikkeet.
Mahdollistimme myös robotin etäohjauksen laajennettua todellisuutta* (XR) hyödyntäen, mikä avaa uusia mahdollisuuksia esimerkiksi vaarallisten työympäristöjen automatisointiin.
Sovellusmahdollisuudet
RIM-projektissa kehitettyä teknologiaa voidaan tulevaisuudessa soveltaa laajalti teollisuudessa, kuten:
- Näppäryyttä vaativiin kokoonpanotehtäviin
- Etäohjattaviin työvaiheisiin vaarallisissa ympäristöissä
- Monimutkaisiin laaduntarkastustehtäviin ja mittauksiin
- Robottien ohjelmointiin ilman ohjelmointiosaamista
Lue lisää projektista blogistamme klikkaamalla tästä tai tutustu muihin EU-projekteihimme klikkaamalla täältä.
*Laajennettu todellisuus, XR eli Extended Reality on kattotermi, jolla tarkoitetaan lisättyä todellisuutta (AR), virtuaalitodellisuutta (VR) sekä näiden erilaisia välimuotoja (MR).


